ADS-B Flight Tracking with a Raspberry Pi and USB-Connected Software-Defined Radio
ADS-B Flight Tracking
The Raspberry Pi is an extremely low-cost yet highly capable Linux platform. Let's combine one with a USB-connected Software-Defined Radio to receive and process data broadcast at 1090 MHz by aircraft flying overhead. ADS-B is part of US, Canadian, Australian, and European air traffic control systems. Aircraft broadcast their positions and other flight data. The resulting data collection can replace secondary radar surveillance.
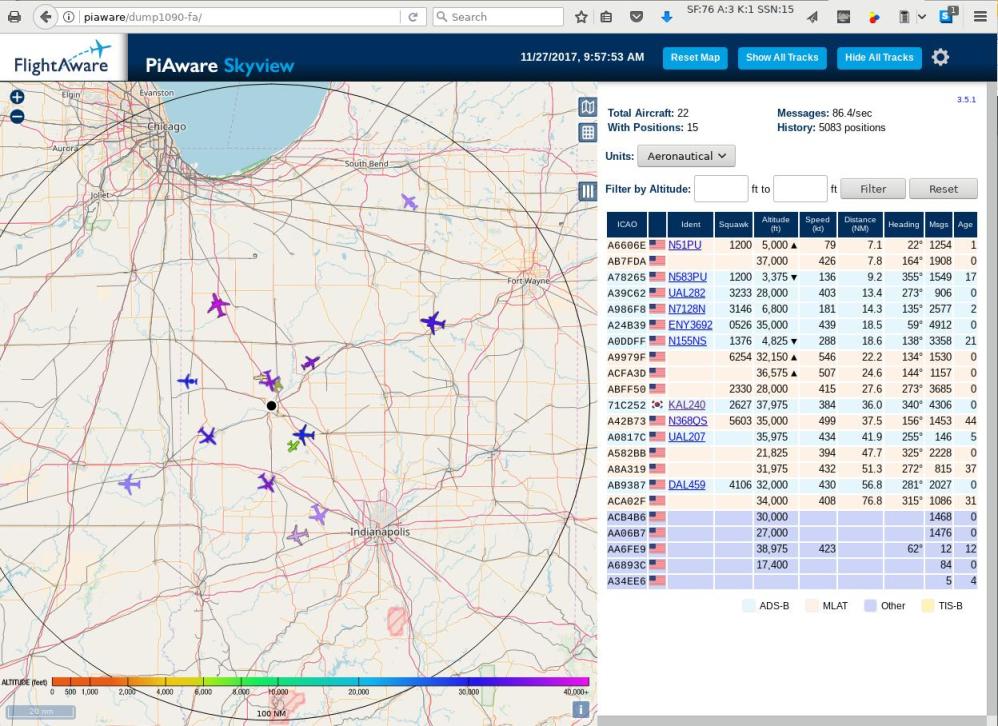
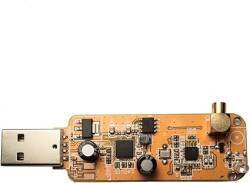
ADS-B tracking data received with an RTL SDR unit plugged into a Raspberry Pi. RTL SDR means it's based on a RealTek chip set and it's a Software-Defined Radio. It looks like an over-sized USB thumbdrive and costs about US$ 10-20. This system is running the free PiAware software. Light purple aircraft icons indicate tracking by multilateration.
ADS-B or Automatic Dependent Surveillance — Broadcast collects aircraft data including position from a GPS navigational system, elevation, air speed, and bearing. It is "Automatic" in the sense that the system runs on its own with no control input from the pilot, "Dependent" in the sense that it needs position input from other on-board systems, and "Broadcast" in the sense that the data is transmitted as cleartext at 1090 MHz, easily received by simple ground stations. Aircraft at higher altitudes may be easily received at distances of 100 miles or more.
Aircraft registrationdatabase lookup:
Map ICAO hex codes
like
aa4c3eto registration
By 2015, ADS-B was mandatory in parts of Australian airspace and it was being used for air traffic control in Canada. It is part of the Single European Sky ATM Research or SESAR, and the U.S. Next Generation Air Transportation System or NextGen. Position and velocity information is broadcast once per second through what is essentially a modified Mode S radar transponder. In most cases the position information is more accurate than what can be obtained by current air surveillance radar systems.
Air Surveillance Radar
Primary Surveillance Radar (or PSR) detects objects by the "skin paint" return, the reflection from the aircraft. The return energy falls off as the fourth power of range, a severe penalty defined by the radar equation for received signal power:
| Pr | = | Pt Gt Ar σ F4 |
| (4π)2 Rt2 Rr2 |
Pr = signal power returning from the target to the receiving antenna
Pt = transmitter power
Gt = transmitter antenna gain
Ar = effective aperture of receiving antenna, which can be calculated as Grλ2/4π where Gr is receive antenna gain and λ is wavelength
σ = radar cross section of the target
F = propagation factor
Rt and Rr are ranges (that is, distances) from the transmitter to the target and from the receiver to the target, respectively. The receiver and transmitter can be widely separated in bistatic radar systems and these two ranges may be significantly different.
With the transmitter and receiver co-located and so just a single range value R, the return signal power is proportional to 1/R4. If you double the range, the return signal drops by a factor of 16. At ten times the range, the return signal drops to just 1/10,000 or 0.01% of the original level.
This limits the range and accuracy of primary surveillance radar.
Secondary Surveillance Radar (or SSR) is derived from the IFF or Identification Friend or Foe systems designed during World War II. The radar pulse interrogates the aircraft, requesting a data packet from its transponder. The radar transmits at 1030 MHz, the transponder replies at 1090 MHz.
This can work at a much greater range than the primary radar given similar transmit power, antenna gain, and receive sensitivity, as the received signal levels in both directions fall off only at a rate of R2 rather than R4.
A Mode A transponder simply reports the aircraft's identity. Mode C also reports the pressure altitude. Mode S can send 56 to 1,280 bits of information per return.
Multilateration (or MLAT) is used to calculate the location of aircraft with Mode S but not ADS-B transponders. The aircraft are located using the time difference of arrival of their signals at three or more FlightAware receivers. They appear as light purple aircraft icons.
U.S. MilitaryCallsigns
Military aircraft will appear with their callsign, typically a word indicating the unit and a number for which aircraft. I see INDY and MASH, KC-135R tankers with the 434th Air Refueling Wing out of Grissom Air Reserve Base near Peru, Indiana. REACH is a general callsign used by various Air Mobility Command cargo aircraft. Look up the ICAO hex code at airframes.org to see the aircraft type.
Software-Defined Radio
Build a 1090 MHzADS-B antenna
Small SDR units marketed primarily for television reception are available for only about US$ 10–20. They include a USB-connected receiver and a small whip antenna on a short coaxial cable. They are intended for markets like Hong Kong and other large coastal Chinese cities, where people commonly use one of these plus a laptop computer in place of a dedicated television set.
1090 MHz means a wavelength of 27.5 cm, so a quarter-wave whip would be just 6.9 cm or 2.7 inches long. The antenna supplied with these units is about twice that length. Click here for how to build a simple ADS-B antenna.



Most RTL-SDR devices use an MCX antenna connector. Adapters from MCX to SMA or F or pigtails are available from Amazon and eBay.
Realtek RTL2832U units have varying tuning ranges depending on the tuner chip. Not all of them cover 1090 MHz. The E4000 has the highest tuning range, although with a gap around 1100–1250 MHz and no coverage below 52 MHz.
| Tuner Chip | Frequency Range |
| Elonics E4000 | 52 – 1100, 1250 – 2200 (gap varies) |
| Rafael Micro R820T | 24 – 1766 MHz |
| Rafael Micro R828T | 24 – 1766 MHz |
| Fitipower FC0013 | 22 – 1100 MHz |
| Fitipower FC0012 | 22 – 948.6 MHz |
| FCI FC2580 | 146 – 308, 438 – 924 MHz |
Use lsusb to find the
Vendor ID and Product ID.
This shows that mine should have
an E4000 tuner, but see the warning further below:
$ lsusb [... other lines deleted ...] Bus 001 Device 005: ID 0bda:2838 Realtek Semiconductor Corp. RTL2838 DVB-T [... other lines deleted ...]
Here is a list of RTL SDR devices known to work with common SDR software, based on a list at osmocom.org.
| Vendor:Product | Tuner | Device | |
| 0x0bda | 0x2832 | all/any | Generic RTL2832U (e.g. hama nano) |
| 0x0bda | 0x2838 | E4000 | ezcap USB 2.0 DVB-T/DAB/FM dongle See following warning |
| 0x0ccd | 0x00a9 | FC0012 | Terratec Cinergy T Stick Black (rev 1) |
| 0x0ccd | 0x00b3 | FC0013 | Terratec NOXON DAB/DAB+ USB dongle (rev 1) |
| 0x0ccd | 0x00d3 | E4000 | Terratec Cinergy T Stick RC (Rev.3) |
| 0x0ccd | 0x00e0 | E4000 | Terratec NOXON DAB/DAB+ USB dongle (rev 2) |
| 0x185b | 0x0620 | E4000 | Compro Videomate U620F |
| 0x185b | 0x0650 | E4000 | Compro Videomate U650F |
| 0x1f4d | 0xb803 | FC0012 | GTek T803 |
| 0x1f4d | 0xc803 | FC0012 | Lifeview LV5TDeluxe |
| 0x1b80 | 0xd3a4 | FC0013 | Twintech UT-40 |
| 0x1d19 | 0x1101 | FC2580 | Dexatek DK DVB-T Dongle (Logilink VG0002A) |
| 0x1d19 | 0x1102 | ? | Dexatek DK DVB-T Dongle, MSI (DigiVox?) mini II V3.0 |
| 0x1d19 | 0x1103 | FC2580 | Dexatek Technology Ltd. DK 5217 DVB-T Dongle |
| 0x0458 | 0x707f | ? | Genius TVGo DVB-T03 USB dongle (Ver. B) |
| 0x1b80 | 0xd393 | FC0012 | GIGABYTE GT-U7300 |
| 0x1b80 | 0xd394 | ? | DIKOM USB-DVBT HD |
| 0x1b80 | 0xd395 | FC0012 | Peak 102569AGPK |
| 0x1b80 | 0xd39d | FC0012 | SVEON STV20 DVB-T USB & FM |
Beware: Some devices are externally labeled "DVB-T+DAB+FM", which identify on the USB bus as 0x0bda:0x2838 (ezcap, expected to have an E4000 tuner). However, they instead have a Fitipower FC0012 tuner and thus are not suitable for ADS-B as they only cover 22-948.6 MHz. You will see:
$ lsusb
Bus 001 Device 004: ID 0bda:2838 Realtek Semiconductor Corp. RTL2838 DVB-T
Bus 001 Device 005: ID 0424:7800 Standard Microsystems Corp.
Bus 001 Device 003: ID 0424:2514 Standard Microsystems Corp. USB 2.0 Hub
Bus 001 Device 002: ID 0424:2514 Standard Microsystems Corp. USB 2.0 Hub
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
$ dump1090-mutability
Wed Jun 13 15:55:43 2018 EDT dump1090-mutability v1.14 starting up.
Found 1 device(s):
0: Realtek, RTL2838UHIDIR, SN: 00000001 (currently selected)
Found Fitipower FC0012 tuner
Max available gain is: 19.20 dB
Setting gain to: 19.20 dB
[FC0012] no valid PLL combination found for 1090000000 Hz!
Exact sample rate is: 2000000.052982 Hz
Gain reported by device: 19.20 dB
^C
Caught SIGINT, shutting down..
Normal exit.
Amazon B00SXZDUAQ

Amazon B00CTJN480
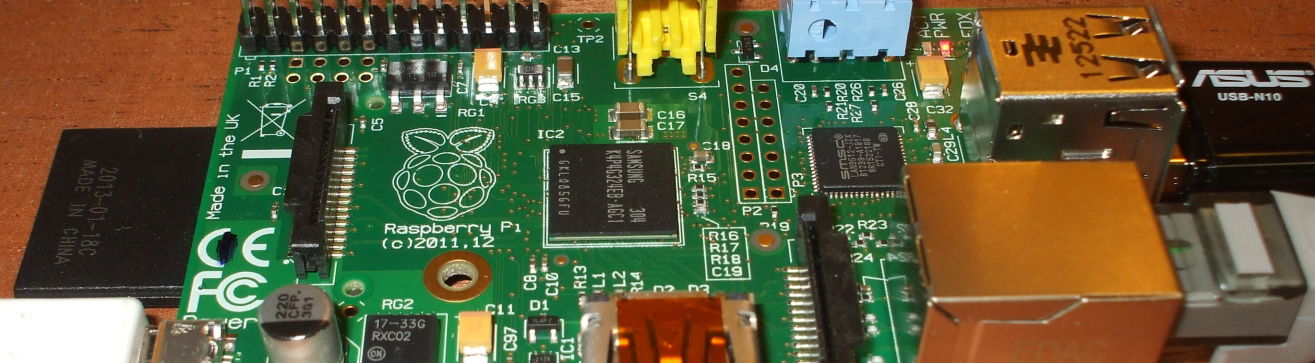
Raspberry Pi
The Raspberry Pi is a small single-board computer available for US$ 30–45. Typical models are based around a Broadcom BCM2835 with a low-power ARM processor running at 700 MHz and a dual-core GPU. Newer models include a quad-core 900 MHz CPU with 1 GB of RAM. There is onboard 10/100 MHz Ethernet and two or four USB 2.0 ports. The board is 86 × 54 mm, just a little too large to fit into an Altoids tin. Audio and video output is through an HDMI port, See some other pages of mine for details on the Raspberry Pi hardware and networking.
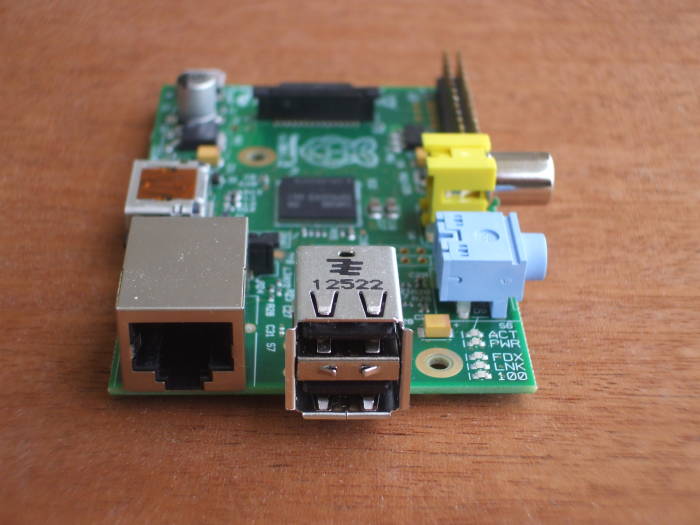
Raspberry Pi with one 10/100 Mbps Ethernet port and two USB ports.

Two Raspberry Pi systems in a small surplus case.
Installing PiAware
FlightRadar24FR24 Software FlightAware
PiAware
PiAware is an ADS-B software package. It's free to download and easy to install, see the FlightAware PiAware page for details. If you already have a Raspberry Pi running, all you need to do is download and install PiAware.
Another alternative is the FlightRadar24 FR24 software. You can run both FR24 and PiAware at the same time, and have premium access to both FlightAware.com and FlightRadar24.com.
Linux packagemanagement
The obvious PiAware download is a
Debian .deb package.
Most people use a Debian-derived Linux distribution on their
Raspberry Pi, like the
Raspbian
distro.
But if you are using
Pidora
or another RPM-based Linux distro,
or something like
FreeBSD,
you can download and build PiAware from the
source code.
Starting piaware at Boot
Once you install PiAware it will be configured to automatically start every time the system boots:
$ ls -l /etc/rc*/*pidora /etc/init.d/pidora -rwxr-xr-x 1 root root 1486 Jul 9 07:41 /etc/init.d/piaware lrwxrwxrwx 1 root root 17 Aug 13 11:28 /etc/rc0.d/K01piaware -> ../init.d/piaware lrwxrwxrwx 1 root root 17 Aug 13 11:28 /etc/rc1.d/K01piaware -> ../init.d/piaware lrwxrwxrwx 1 root root 17 Aug 13 11:28 /etc/rc2.d/S02piaware -> ../init.d/piaware lrwxrwxrwx 1 root root 17 Aug 13 11:28 /etc/rc3.d/S02piaware -> ../init.d/piaware lrwxrwxrwx 1 root root 17 Aug 13 11:28 /etc/rc4.d/S02piaware -> ../init.d/piaware lrwxrwxrwx 1 root root 17 Aug 13 11:28 /etc/rc5.d/S02piaware -> ../init.d/piaware lrwxrwxrwx 1 root root 17 Aug 13 11:28 /etc/rc6.d/K01piaware -> ../init.d/piaware
It seems at first that it works:
$ sudo bash # /etc/init.d/piaware status piaware is running
But let's ask the running process for details:
# piaware-status dump1090 is not running. faup1090 is not running. piaware is running. no program appears to be listening for connections on port 30005. faup1090 is NOT connected to port 30005. piaware is connected to FlightAware. got 'couldn't open socket: connection refused' maybe dump1090 is NOT producing data on port 30005.
The piaware service did not get
dump1090 running, a process that decodes
ADS-B data and makes it available on a TCP port.
We can try to start it:
# dump1090 --quiet --net Found 1 device(s): 0: Realtek, RTL2838UHIDIR, SN: 00000091 (currently selected) Kernel driver is active, or device is claimed by second instance of librtlsdr. In the first case, please either detach or blacklist the kernel module (dvb_usb_rtl28xxu), or enable automatic detaching at compile time. usb_claim_interface error -6 Error opening the RTLSDR device: Device or resource busy
Let's investigate further by listing the RTL kernel modules:
# lsmod | grep rtl dvb_usb_rtl28xxu 17133 0 rtl2830 8206 1 dvb_usb_rtl28xxu rtl2832 9990 2 dvb_usb_rtl28xxu i2c_mux 2471 1 rtl2832 dvb_usb_v2 15893 1 dvb_usb_rtl28xxu dvb_core 100357 3 rtl2830,rtl2832,dvb_usb_v2 rc_core 23526 14 ir_sharp_decoder,ir_xmp_decoder,lirc_dev,ir_lirc_codec,dvb_usb_rtl28xxu,ir_rc5_decoder,ir_nec_decoder,ir_sony_decoder,ir_mce_kbd_decoder,ir_jvc_decoder,dvb_usb_v2,ir_rc6_decoder,ir_sanyo_decoder
One way to fix this
would be to add a block to /etc/rc.local:
# cat /etc/rc.local
[... other lines deleted ...]
### PiAware ADS-B flight tracking
echo "Restarting dump1090 and piaware ADS-B flight tracking"
/etc/init.d/piaware stop
while [ "$(pgrep dump1090)" ]
do
echo " killing $(pgrep dump1090)"
pkill dump1090
done
for MODULE in $( lsmod | awk '{print $1}' | grep rtl28 )
do
echo " removing module $MODULE"
rmmod -s $MODULE
done
dump1090 --quiet --net &
/etc/init.d/piaware start
/etc/init.d/piaware status
piaware-status
# /etc/rc.local
Restarting dump1090 and piaware ADS-B flight tracking
Stopping piaware server: piaware.
Found 1 device(s):
0: Realtek, RTL2838UHIDIR, SN: 00000091 (currently selected)
Starting piaware server: piaware.
Found Elonics E4000 tuner
Max available gain is: 42.00
Setting gain to: 42.00
Exact sample rate is: 2000000.052982 Hz
Gain reported by device: 42.00
piaware is running
dump1090 is running.
faup1090 is running.
piaware is running.
dump1090 is listening for connections on port 30005.
faup1090 is connected to port 30005.
piaware is connected to FlightAware.
dump1090 is producing data on port 30005.
A simpler fix is to blacklist the kernel module. Put this in the appropriate file and reboot:
# cat /etc/modprobe.d/piaware-blacklist.conf blacklist dvb-usb-rtl28xxu
The dump1090 process is listening on TCP ports
10001, 30001, 30002, 30003, 30004, and 30005, plus
TCP port 8080 ("http-alt") which provides a web service.
# lsof -p $( pgrep dump1090 ) COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAME dump1090 2833 root cwd DIR 179,2 12288 132781 / dump1090 2833 root rtd DIR 179,2 4096 2 / dump1090 2833 root txt REG 179,2 122140 4160 /usr/bin/dump1090 dump1090 2833 root mem REG 179,2 26632 6102 /lib/arm-linux-gnueabihf/librt-2.13.so dump1090 2833 root mem REG 179,2 1200240 6099 /lib/arm-linux-gnueabihf/libc-2.13.so dump1090 2833 root mem REG 179,2 130448 15082 /lib/arm-linux-gnueabihf/libgcc_s.so.1 dump1090 2833 root mem REG 179,2 427628 4559 /lib/arm-linux-gnueabihf/libm-2.13.so dump1090 2833 root mem REG 179,2 116462 5425 /lib/arm-linux-gnueabihf/libpthread-2.13.so dump1090 2833 root mem REG 179,2 50856 30702 /lib/arm-linux-gnueabihf/libusb-1.0.so.0.1.0 dump1090 2833 root mem REG 179,2 10170 1777 /usr/lib/arm-linux-gnueabihf/libcofi_rpi.so dump1090 2833 root mem REG 179,2 126236 4569 /lib/arm-linux-gnueabihf/ld-2.13.so dump1090 2833 root 0r CHR 1,3 0t0 3261 /dev/null dump1090 2833 root 1u CHR 136,0 0t0 3 /dev/pts/0 dump1090 2833 root 2u CHR 136,0 0t0 3 /dev/pts/0 dump1090 2833 root 3r FIFO 0,8 0t0 7679 pipe dump1090 2833 root 4w FIFO 0,8 0t0 7679 pipe dump1090 2833 root 5u 0000 0,9 0 3258 anon_inode dump1090 2833 root 6u CHR 189,4 0t0 3610 /dev/bus/usb/001/005 dump1090 2833 root 7u IPv4 7687 0t0 TCP *:30002 (LISTEN) dump1090 2833 root 8u IPv4 7688 0t0 TCP *:30001 (LISTEN) dump1090 2833 root 9u IPv4 7689 0t0 TCP *:30005 (LISTEN) dump1090 2833 root 10u IPv4 7690 0t0 TCP *:30004 (LISTEN) dump1090 2833 root 11u IPv4 7691 0t0 TCP *:http-alt (LISTEN) dump1090 2833 root 12u IPv4 7692 0t0 TCP *:30003 (LISTEN) dump1090 2833 root 13u IPv4 7693 0t0 TCP *:10001 (LISTEN) dump1090 2833 root 14u IPv4 8161 0t0 TCP localhost:30005->localhost:35501 (ESTABLISHED) dump1090 2833 root 15u IPv4 8621 0t0 TCP localhost:30005->localhost:35503 (ESTABLISHED) dump1090 2833 root 16u IPv4 8704 0t0 TCP localhost:30004->localhost:45242 (ESTABLISHED)
Use a web browser to connect to TCP port 8080 on your Raspberry Pi:
The piaware process will be connected to a
FlightAware server, uploading the data you are receiving.
This automatically upgrades you to a free Enterprise
membership at FlightAware:
# lsof -p $( pgrep piaware ) COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAME piaware 2842 root cwd DIR 179,2 4096 2 / piaware 2842 root rtd DIR 179,2 4096 2 / piaware 2842 root txt REG 179,2 3896 7814 /usr/bin/piaware piaware 2842 root mem REG 179,2 71528 13346 /lib/arm-linux-gnueabihf/libresolv-2.13.so piaware 2842 root mem REG 179,2 18040 4554 /lib/arm-linux-gnueabihf/libnss_dns-2.13.so piaware 2842 root mem REG 179,2 95324 47276 /usr/lib/libitcl3.4.so.1 piaware 2842 root mem REG 179,2 87792 5150 /lib/arm-linux-gnueabihf/libz.so.1.2.7 piaware 2842 root mem REG 179,2 1410384 3952 /usr/lib/arm-linux-gnueabihf/libcrypto.so.1.0.0 piaware 2842 root mem REG 179,2 297452 3953 /usr/lib/arm-linux-gnueabihf/libssl.so.1.0.0 piaware 2842 root mem REG 179,2 32424 47269 /usr/lib/libtls1.6.so piaware 2842 root mem REG 179,2 130800 10799 /usr/lib/libtclx8.4.so.0 piaware 2842 root mem REG 179,2 42692 6007 /lib/arm-linux-gnueabihf/libnss_files-2.13.so piaware 2842 root mem REG 179,2 38608 4573 /lib/arm-linux-gnueabihf/libnss_nis-2.13.so piaware 2842 root mem REG 179,2 71624 13291 /lib/arm-linux-gnueabihf/libnsl-2.13.so piaware 2842 root mem REG 179,2 26484 13347 /lib/arm-linux-gnueabihf/libnss_compat-2.13.so piaware 2842 root mem REG 179,2 2025648 10547 /usr/lib/locale/locale-archive piaware 2842 root mem REG 179,2 130448 15082 /lib/arm-linux-gnueabihf/libgcc_s.so.1 piaware 2842 root mem REG 179,2 427628 4559 /lib/arm-linux-gnueabihf/libm-2.13.so piaware 2842 root mem REG 179,2 9812 13289 /lib/arm-linux-gnueabihf/libdl-2.13.so piaware 2842 root mem REG 179,2 1200240 6099 /lib/arm-linux-gnueabihf/libc-2.13.so piaware 2842 root mem REG 179,2 116462 5425 /lib/arm-linux-gnueabihf/libpthread-2.13.so piaware 2842 root mem REG 179,2 975580 58942 /usr/lib/libtcl8.5.so.0 piaware 2842 root mem REG 179,2 10170 1777 /usr/lib/arm-linux-gnueabihf/libcofi_rpi.so piaware 2842 root mem REG 179,2 126236 4569 /lib/arm-linux-gnueabihf/ld-2.13.so piaware 2842 root 0u CHR 1,3 0t0 3261 /dev/null piaware 2842 root 1w REG 179,2 5575 269 /tmp/piaware.out piaware 2842 root 2w REG 179,2 5575 269 /tmp/piaware.out piaware 2842 root 3r FIFO 0,8 0t0 7680 pipe piaware 2842 root 4w FIFO 0,8 0t0 7680 pipe piaware 2842 root 5u IPv4 7910 0t0 TCP raspberrypi.kc9rg.org:46232->eyes.flightaware.com:1200 (ESTABLISHED) piaware 2842 root 6r FIFO 0,8 0t0 8146 pipe piaware 2842 root 7r FIFO 0,8 0t0 8308 pipe piaware 2842 root 8u REG 179,2 0 866 /tmp/tcl1uXddV (deleted) piaware 2842 root 11w FIFO 0,8 0t0 8309 pipe piaware 2842 root 12r FIFO 0,8 0t0 8310 pipe